Team Vector
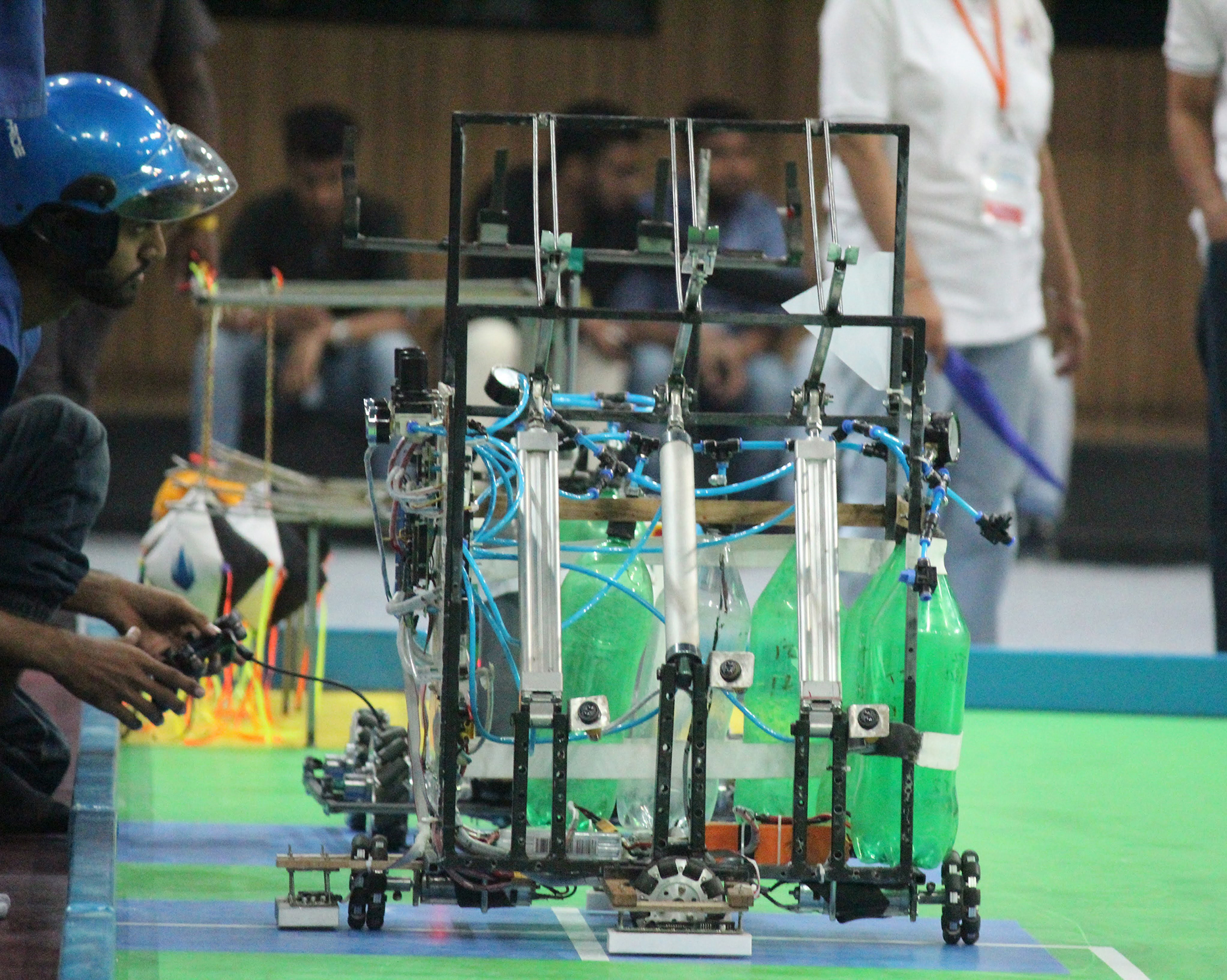
Image 1: Autonomous Shuttle Launching Robot

Image 2: Manual Robot - responsible for shuttlecock transfer to the Autonomous Robot.
As a core team member, I led and collaborated with a 40-member robotics team in ABU Robocon India, a prestigious pan-Asian robotics competition. My responsibilities encompassed the design, manufacturing, testing, and integration of power and logic interfaces for both manual and autonomous robots.
Shuttle Launching Autonomous Robot and Manual Robot (ABU Robocon 2018): As part of a collaborative team effort, we designed and developed two robots—a manually operated robot and a fully autonomous robot. The manual robot plays a crucial role in transferring shuttlecocks to the autonomous robot. The team collectively developed a differential-driven autonomous robot and engineered a pneumatically actuated hardware system, seamlessly integrating it into the autonomous robot's catapult mechanism that can launch shuttles through circular hoops using a pneumatic actuator. In addition to our collective work, I played a key role in designing custom hardware, conducting sensor testing, optimizing pneumatic actuators, managing motor control, and creating new components within schematic and footprint layouts.
Autonomous Quadruped Robot and Manual Robot (ABU Robocon 2019): As a team, we successfully developed a manual robot by implementing a holonomic drive system with force vector analysis and integrating an optical ray encoder for precise feedback. We also achieved the implementation of a servo-based gripper for locking and releasing mechanisms, accompanied by a highly accurate pneumatic system for the loading and throwing mechanism. The team led the development of a fully autonomous quadruped robot that incorporates Trot Gait analysis for improved performance. Furthermore, I designed the PCBs that served as the heart of both robots, including the 'PCB for Manual and Autonomous Robots', 'Battery Fuel Gauge', and 'LCD & Relay Breakout Board'.