Autonomous & Undersea Systems Division

Image 1: Autonomous Surface Vessel
Image source: Aerospace Engineers Private Limited, 2022

Image 2: Autonomous Underwater Vehicle (named 'Neerakshi' AUV)
Image source: Vajiram & Ravi (IAS Study Center), 2023, https://vajiramias.com/
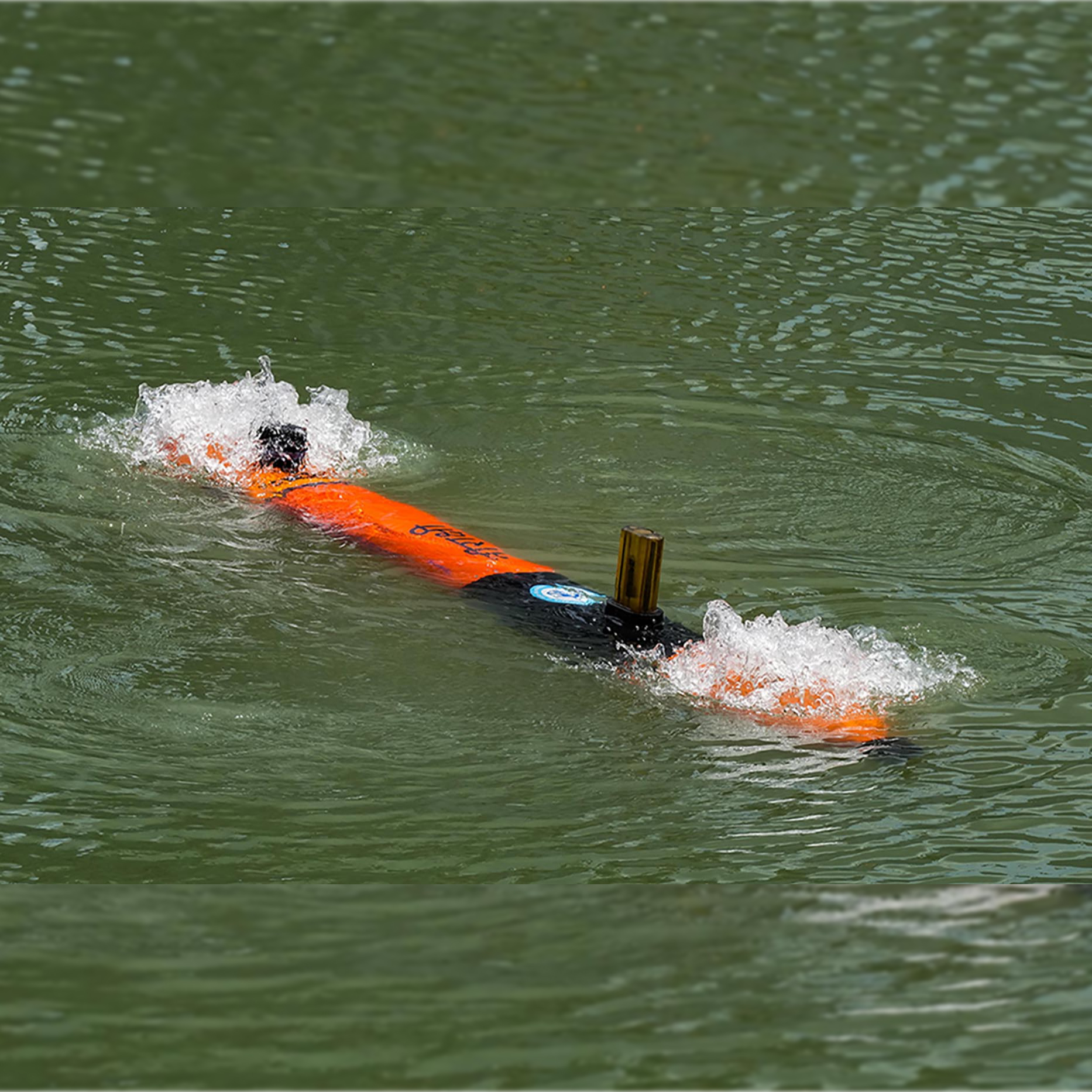
Image 3: 'Neerakshi' AUV maneuvering through water with surface current
Image source: The Indian Express, 2023, https://indianexpress.com/
During my tenure at the Autonomous & Undersea Systems Division of Aerospace Engineers Private Limited (AEPL), I led research and development in unmanned marine vehicles, significantly improving project efficiency and achieving notable cost reductions through optimized designs and effective project management practices.
My responsibilities involved designing advanced electrical architectures and embedded electronic systems for various unmanned marine vehicles. A key highlight was the successful development of the Neerakshi Autonomous Underwater Vehicle (AUV), a 2.15-meter-long vehicle capable of operating at depths up to 300 meters with an endurance of nearly 4 hours, marking a substantial increase in operational endurance. Additionally, I contributed extensively to other marine platforms, including Remotely Operated Vehicles (ROVs) and Autonomous Surface Vessels (ASVs).
My role covered the entire product development lifecycle, from initial hardware concept to fully integrated prototypes. Tasks included component selection, schematic creation, multi-layer PCB design, board bring-up, and comprehensive system-level integration. By closely collaborating with cross-functional engineering teams, I facilitated the integration of custom-designed electronics, advanced underwater sensors, payloads, and robust communication systems.
Moreover, I ensured thorough documentation at each stage, from design and development through testing and debugging. This approach enabled seamless knowledge transfer and continuous improvement across projects, fostering long-term innovation and reliability in marine robotic solutions.